
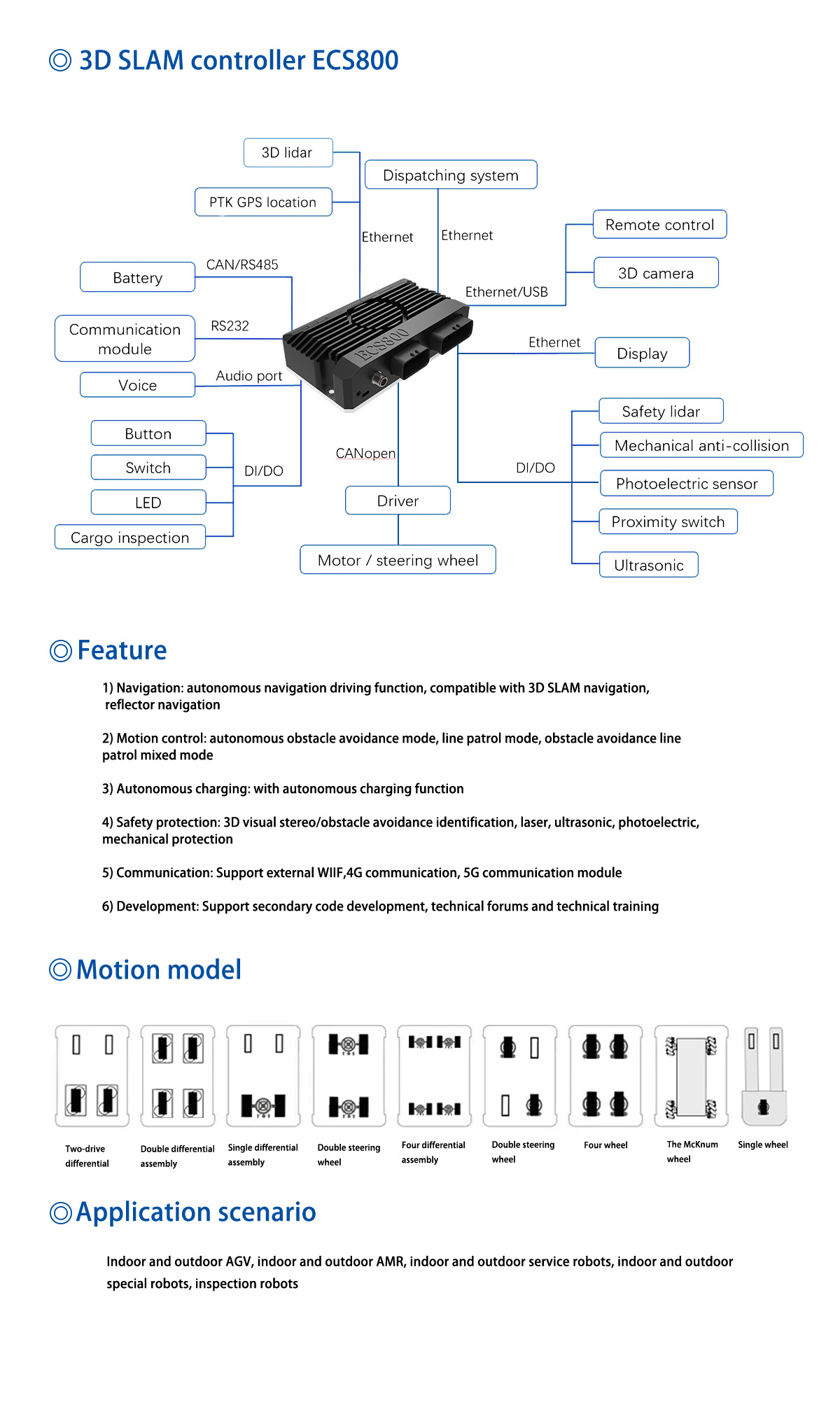
ECS800
3D SLAM controller
The 3D SLAM controller integrates multiple sensor data, such as liDAR, cameras, ultrasonic sensors, etc., by combining these data to improve the accuracy and robustness of positioning and map construction. Ability to process data quickly and provide immediate feedback in a real-time environment; Adapt to different environments, including indoor and outdoor environments, light changes, texture differences, etc., and effectively deal with the challenges brought by these environmental changes.
| Functional item | argument |
| Model number | ECS800 |
| Length * width * height | 200*127*50mm |
| Power source | |
| Input voltage | 18~28V/Vpp<200m (with reverse protection) |
| Current dissipation | Single unit < 0.4A/24V, including peripherals maximum current < 5A (24V) |
| Communication interface | |
| Ethernet | 1000M RJ45 *1 |
| type C | * 1 |
| CAN | * 2 |
| RS485 | * 2 |
| RS232 | * 2 |
| Input/output interface | |
| input | 5V~24V multifunctional isolation digital input * 8 |
| input | 5V~24V Isolated input * 8 |
| exportation | Multifunctional isolation output * 8 |
| exportation | NMOS isolated output * 8 |
| Audio interface | |
| Voice broadcast | Support (3.5mm audio interface) |
| Indicator port | |
| Pilot lamp | Running status indicator, communication indicator |
| Functional parameter | |
| Positioning accuracy | ±10mm (3D SLAM natural navigation) |
| Navigation speed | ≤1.5m/s |
| Angle control accuracy | ±0.5° |
| Motion control | Autonomous obstacle avoidance driving, fixed route driving, obstacle avoidance fixed route mixed driving |
| Map Area (Single map) | ≤800000㎡ (Support multi-map navigation) |
| Other functions | |
| Dispatching system | Optional |
| Supporting design software | support |
| The accompanying application software | support |
| Automatic charging | support |
| External touch screen | support |
| Pallet identification | support |
| Visual localization | support |
| Leg identification | support |
| Follow-up function | support |
| Marker secondary location | support |
| Navigation laser assisted obstacle avoidance | support |
| 3D visual obstacle avoidance | support |
| Functional logic secondary development | support |
